


Perfil y Objetivos
El perfil del LAC está caracterizado por el concepto de I+D+i, es decir, Investigación, Desarrollo e Innovación, en el marco de las TICs, con eje en las áreas de Automatización, Control y Mecatrónica, entendidas en un sentido lato.
Sus objetivos consisten en contribuir a la formación de recursos humanos altamente calificados en el grado y el posgrado, al avance del conocimiento científico-técnico, y a la promoción de su transferencia al sector productivo de la región y el país. Todas estas actividades están orientadas por el propósito del LAC de atender a las necesidades de la sociedad, lo que define su misión.
Líneas de Investigación
| Redes Eléctricas Inteligentes | |
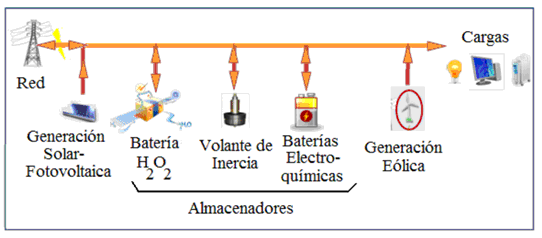 |
El objetivo general de esta línea de investigación es el diseño sistémico (arquitectura y dimensionamiento), la implementación física, la optimización de la gestión y el control en tiempo real de una micro red eléctrica inteligente alimentada por generación solar-fotovoltaica y eólica, conectada a la red de distribución, con inclusión de almacenadores de energía (baterías electrolíticas y de H2) y de potencia (volante de inercia). Estos problemas se abordan, con uso intensivo de modelos matemáticos, de manera integrada o simultánea (en oposición al diseño secuencial tradicional) a fin de satisfacer especificaciones referidas a (i) los perfiles de consumo a los cuales debe responder la red; (ii) los criterios a optimizar en términos de servicios de la red al sistema (compensación de reactivo, alisamiento, recorte de picos de potencia, quita total o parcial de carga (load shedding), seguimiento de trayectorias de referencia); (iii) las restricciones a satisfacer (p. ej., aseguramiento de valores mínimos/máximos de potencia intercambiada con la red) |
| Robótica | |
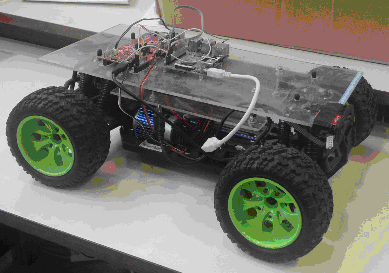 |
El objetivo de esta línea de investigación es el desarrollo de controladores para manipuladores robóticos (MR), robots móviles (RM), y manipuladores robóticos móviles (MRM). A los problemas de control de posición, de fuerza y de agarre abordados en el caso de los MR, y de navegación en los RM, se agregan los de reducción con técnicas de control de las perturbaciones mutuas entre base y brazo manipulador para el caso de los MRM. |
| Diseño y control de convertidores electrónicos de potencia con aplicaciones múltiples | |
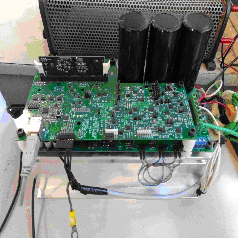 |
La línea de desarrollo se centra en la implementación de diversos convertidores electrónicos de potencia (CEP) en base a un diseño multifuncional propio, con aplicaciones a la conversión de la energía y al control de motores como parte de sistemas mecatrónicos. La línea de investigación aplicada se focaliza en la búsqueda de nuevos métodos con enfoques energéticos para el control de los CEP, con los objetivos de control dictados por las aplicaciones mencionadas. |
| Control de movimiento y gestión de la energía en vehículos híbridos | |
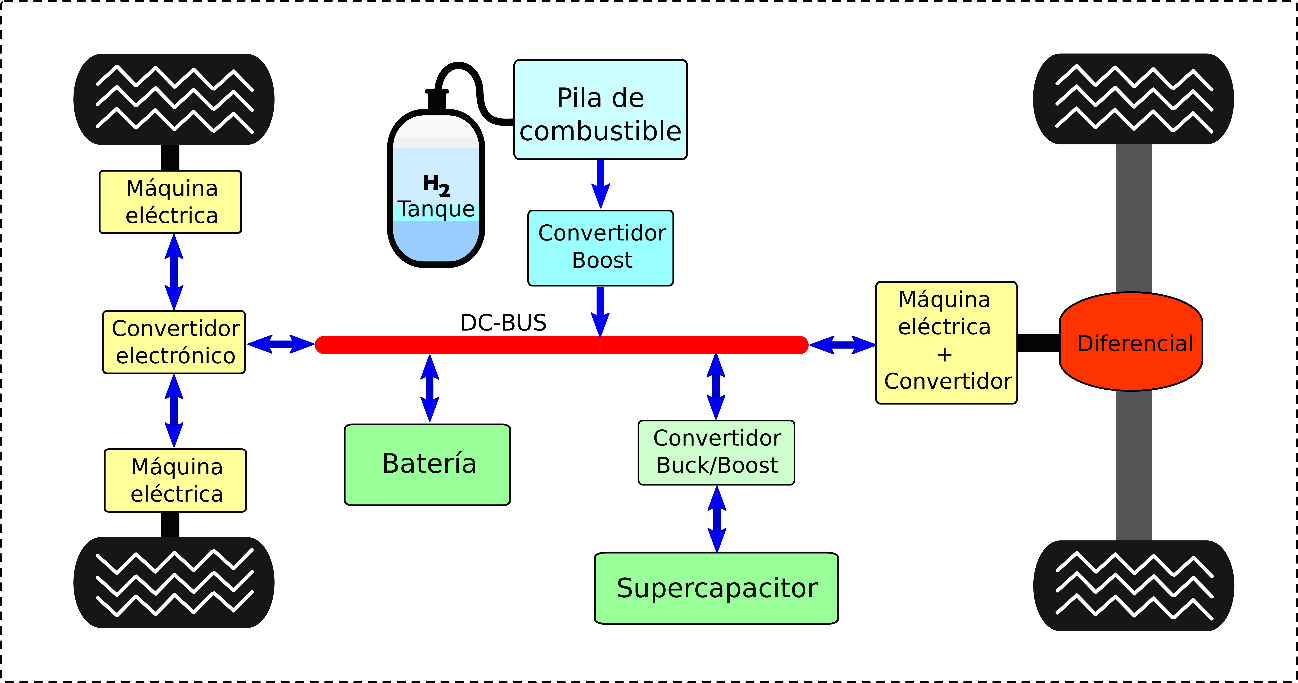 |
Esta línea trata problemas de control de movimiento de vehículos terrestres, a la vez que aborda problemas de decisión de configuración de la arquitectura, el dimensionamiento de los componentes y la gestión energética en vehículos terrestres con plataformas de propulsión híbridas. Metodológicamente, la primera línea es afín a la de Robótica móvil, y la segunda a la de control y gestión de la energía en las redes eléctricas inteligentes. |
| Automatización y Control | |
 |
Se aborda la implementación de las estrategias de control utilizando diferentes herramientas comerciales, incluyendo:
|
Ir a: